IR2104(DIP8pin:中華製)ハーフブリッジゲートドライバと、Nch-MOSFETを使用した、DC(直流)モーターの正転・逆転制御回路と動作実験。
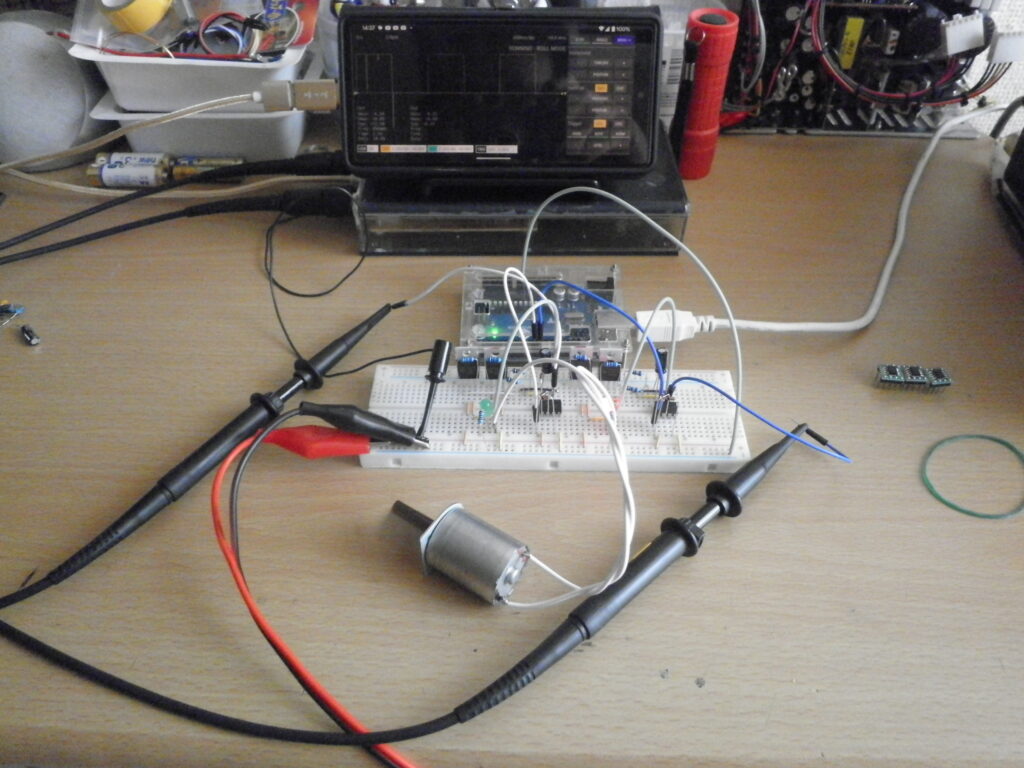
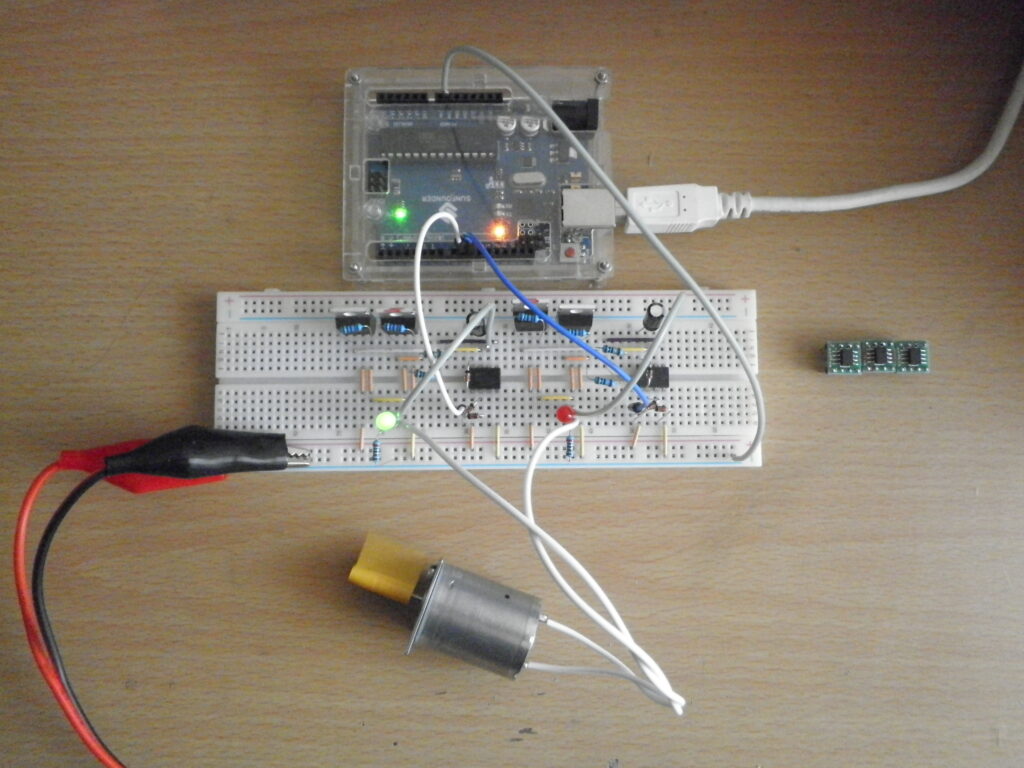
DC(直流)モーターの正転・逆転制御回路と動作実験の様子
今回の本当の、主目標はブラシレスDCモーターの回転制御が目標なのですが、あるサイトの情報を基に回路。ソフトをダウンロードし、組み込みましたが、正常動作しませんでした。何故か??未だに未解決。そこで、先ずはハーフブリッジゲートドライバを理解したくて、DCモーターの正転・逆転制御をと考え、写真の回路を別のサイトを参考に組みました。
当初、2104でBLDCをと考えてたので、参考サイトのドライバとは種類が違います。参考サイトでは2302を使ってました。なので、回路も入力条件も動作も、若干異なります。ソフト・ボードについては、同様です。写真の通り、Arduino-unoを使用してます。(1秒正転、1秒停止、1秒逆転、1秒停止を繰り返します)
今回は、DCモーターのの正転・逆転制御を目指して、あれやこれやと悩みました。特に、2104の入力端子2ピン、3ピンの使い方です。仕様に入出力のロジックが書いてありますが、簡単にしか書いてありません。(多分、私がうましかなんでしょうけど \;^^;/)
BLDCの回路も、DCモーターの回路も、ドライバへの入力は、unoから直接、ドライバへ入力するように書かれてました。ので、そうなのだと思い、その通り接続するのですが、両者とも正常動作しませんでした。そして、BLDCで考えるのが今の自分ではややこしいので、少しでも簡単に考えようとDCモーターの回路で考えることとし、試行錯誤しました。
やって行くうちに見えてきたことは、unoから2104へのハード的な入力条件でした。(吸い込み電流・吐き出し電流・閾値)
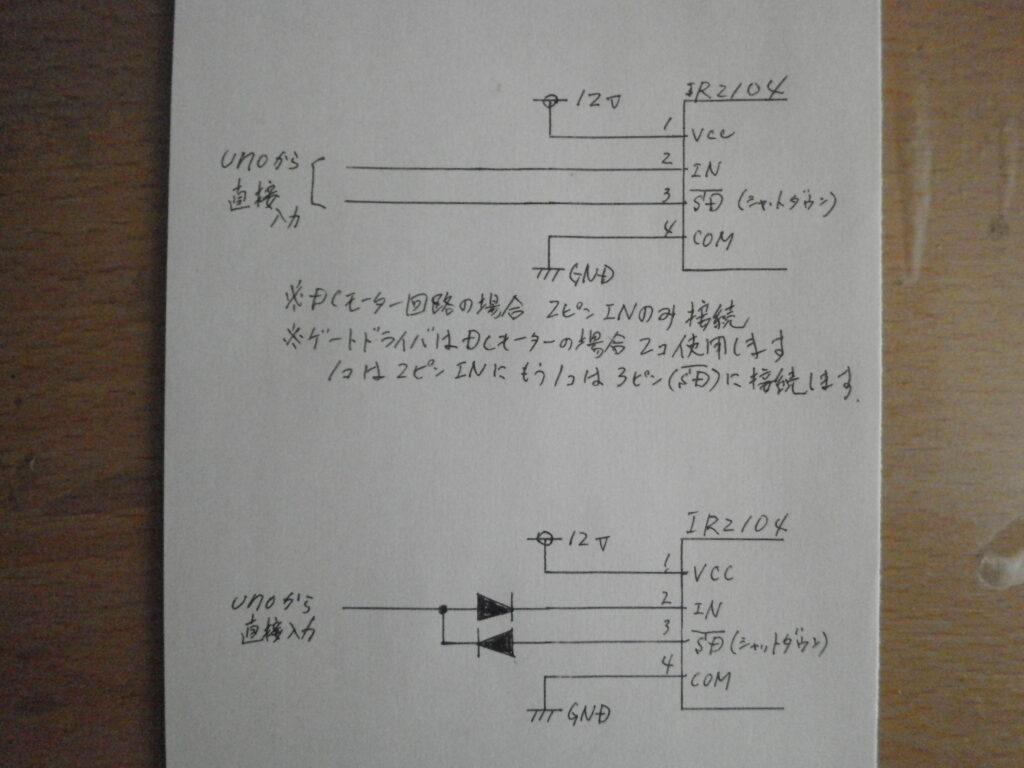
DCモーターの動作には、2104が2個必要です。参考サイトでは、ドライバへの入力はunoから直接入力(両ドライバ同ピン入力)するようになってます。(2302ドライバとの比較・検証も出来てませんけどね)。同様に接続しても動作しませんでした。が、2104にて片側2ピン(1つ目のドライバ)、もう一方を3ピン(2つ目のドライバ)に接続すると正転のみ動作しました。それならばと、2ピンに接続したドライバを3ピン、3ピンに接続したドライバを2ピンに接続すると、逆転が起こりました。ならばと、ソフトの出力ピンを増やして4ピン接続としたのですが全く動作しません。手動で2ピン・3ピンを入れ替えると正常に動作するのにunoに直接接続すると動作しない。なんで?????そこで思いついたのが、入力端子のハイインピーダンス確保!!どうやるか!!手で引き抜いてハイインピーダンス、その後、接続で動作。ここでダイオードが登場しました。(信号が無い時はハイインピーダンスになると考えました)。それぞれのドライバにダイオードを接続してダイオードに対してunoの出力を接続。結果、この方法で正転・逆転が可能となりました。
今回の動作は、uno出力が5V、ドライバの電源が12Vの場合に動作可能となりました。uno出力をコンバータを通したり、トランジスタを通して昇圧(12V)してません。ひょっとしたら、昇圧すれば、ダイオード不要かもです。\(^^;/
最後に、動作中の動画をUPしておきます。ご確認ください。\(^^)/
次回、BLDC回るかな~。回るといいな~。;^^;/
Follow me!