6) マイコンによるモーター制御について
できればエンコーダを使って任意の座標に軸を移動できればいいのですが。まずは単軸で動作確認からですな。エンコーダはインクリメントタイプ(A,B,Z)にして疑似アブソリュート動作をさせます。
先日、発注していたエンコーダが届きました。ミスミで買った、Autonics製のエンコーダです。

いよいよ、ここからですな!!
まずは、ライブラリを使用してみます。(ライブラリ:Stepper_h)ライブラリでは、2相励磁での動作になるように記述してあります。
後、ステッピングモーターを旋回させるためにエンコーダが必要となりますが、Arduino付属のエンコーダと市販のエンコーダによる動画を撮影しています。(ダウンロードにて確認できます)
**) 以降、動画のダウンロードについては、aviファイルが展開できる環境を構築の上、動画をダウンロードしてください。スマホでご覧になる場合、例えば、VLC for android アプリ等を事前にインストールしてください。aviファイルが展開できれば、どれでもよいと思います。よろしく!!(^^”
Arduino付属のエンコーダ
この付属のエンコーダはボード上に取り付けてあります。機構上、押しボタンスイッチがあります。エンコーダ出力のA/B相はボード上の10kΩの抵抗にてプルUPしてあります。押しボタンスイッチは、ピンの設定にてプルUPされています。(Digital Write/Pin mode にてプルUP)
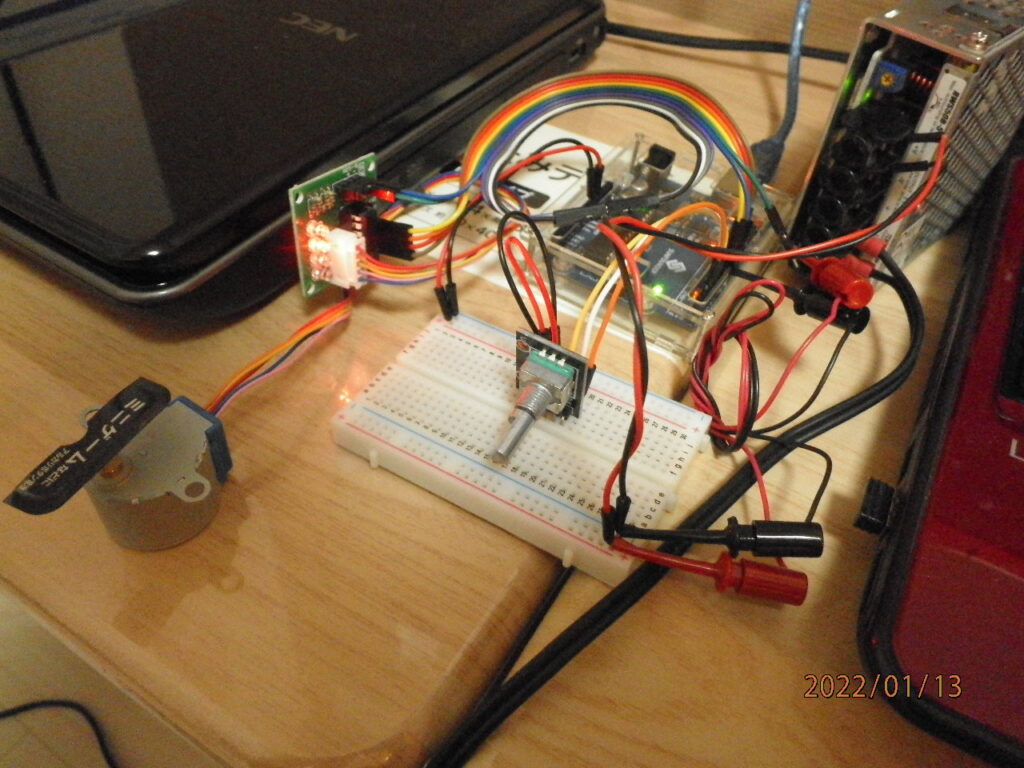
市販のエンコーダ

市販のエンコーダの接続ですが、付属のエンコーダ同様のStepper_hを使ってます。押しボタンスイッチを別に設け、配線。市販のエンコーダにはプルUP抵抗は無いのでA/B相をそれぞれ、別個プルUPしました。市販のエンコーダにはZ相がありますが使っていません。配線は付属のエンコーダ同様です。押しボタンスイッチとエンコーダが分かれただけです。
Follow me!