2) Z80マイコン(ジジイが判る範囲での、お勉強の紹介)(搬送ロボットのエージングにも)
今更ながら、かなり古い物を最近引っ張り出しまして、当時、ヤフオクで買った「YS-6464B」なる、Z80ワンボードマイコンなのですが、メーカーは、「シンコー産業」で、回路図・取説付きでしたが、パラレルI/Oボードは付いてるものの、シリアルI/Oボードが無かったんです。メインのCPUボードに重ねる形でパラレルI/Oボードが乗っかります。さらにパラレルI/Oボードの上にシリアルI/Oボードが乗っかる形で完成となるようなのですが、手元のボードにはシリアルI/Oボードが・・・
当時、3台続けてヤフオクで落札し、4台目を落札し損ねたのです。この4台目にはシリアルI/Oボードが乗っかっていたんですよ。(泣)それ以来、何とかならないものかと思いながら今日に至っておりました。その最中、職場で活用したり、自宅で簡単な通信テストをしたりと色々やってました。ワンボードマイコンは若いころに多少触っていたので購入時はとても懐かしかったです。届いたときは嬉しかったです。
以下が「YS-6464B」の回路図です。
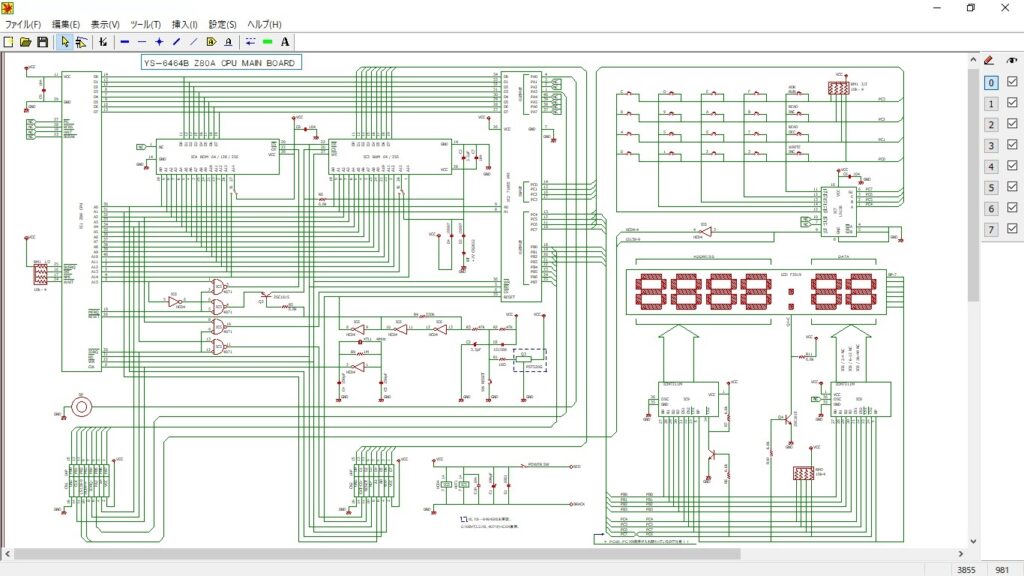

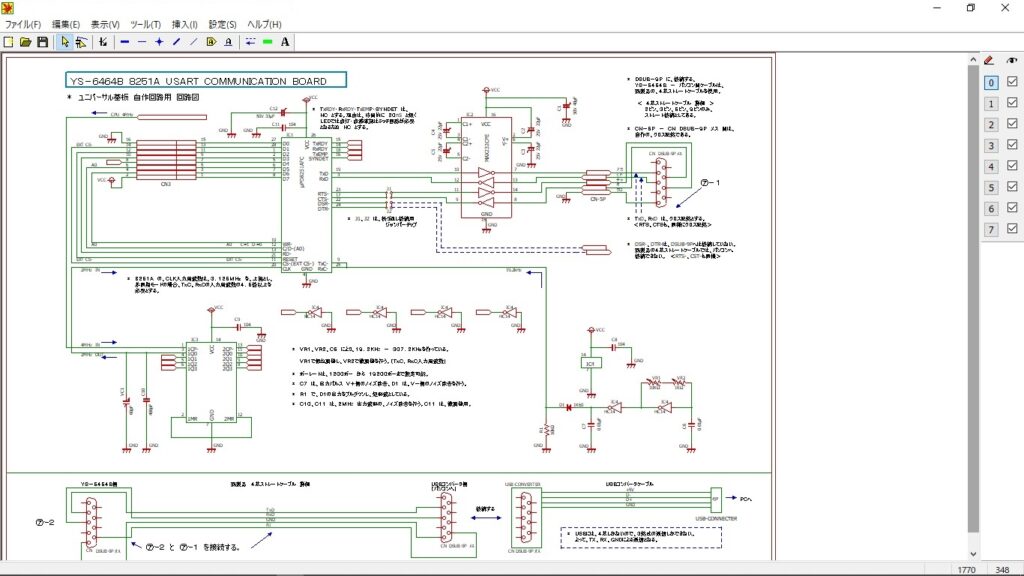
回路図は実物は見づらいので私が勝手に回路図エデイタ「ビースケ」や「CADLUSサーキット」で書き直しました。CPUボードとI/Oボードは分けています。(基板ごとに作図してます)
以下がP-ROMのデータ等、補足説明です。
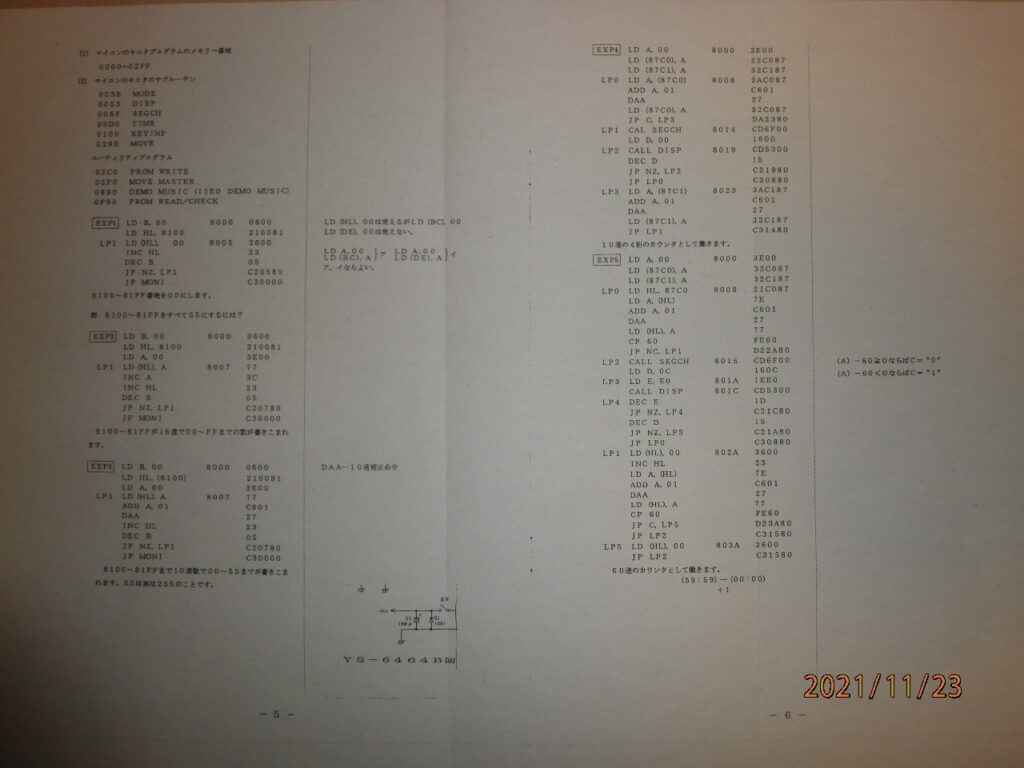
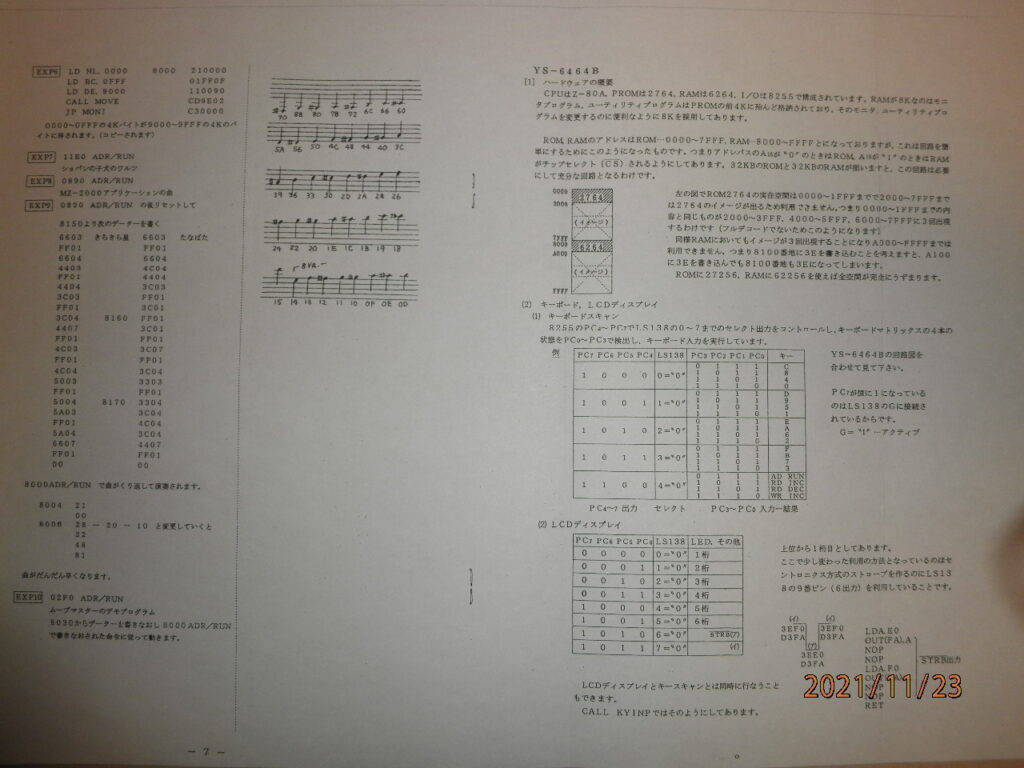
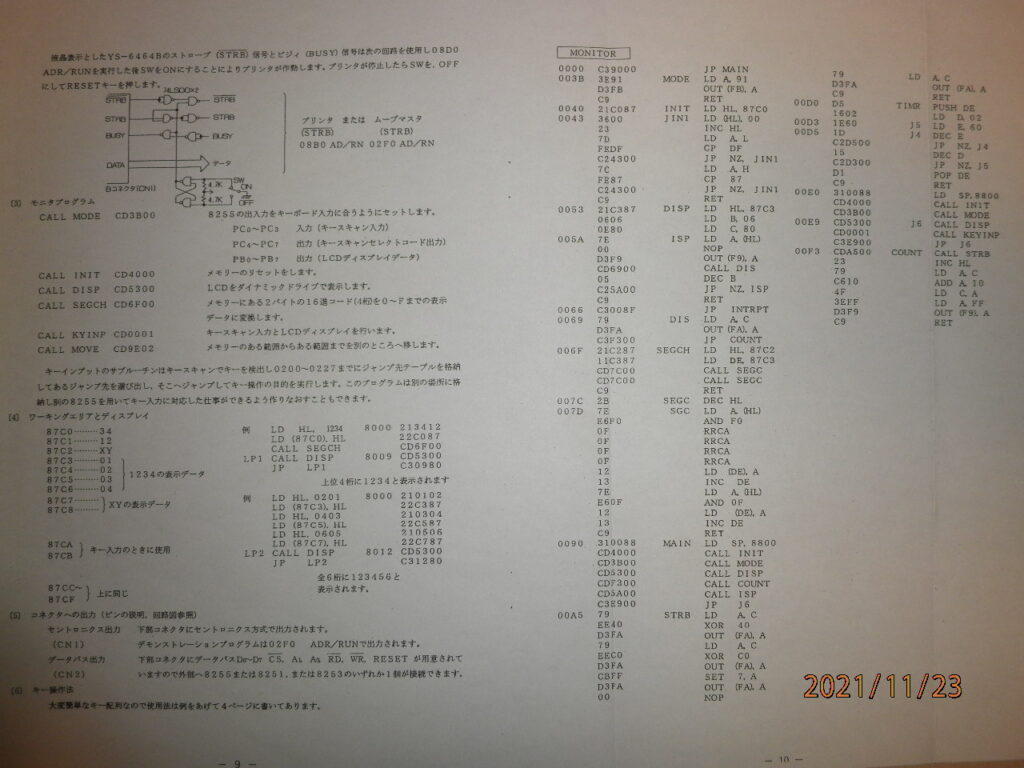
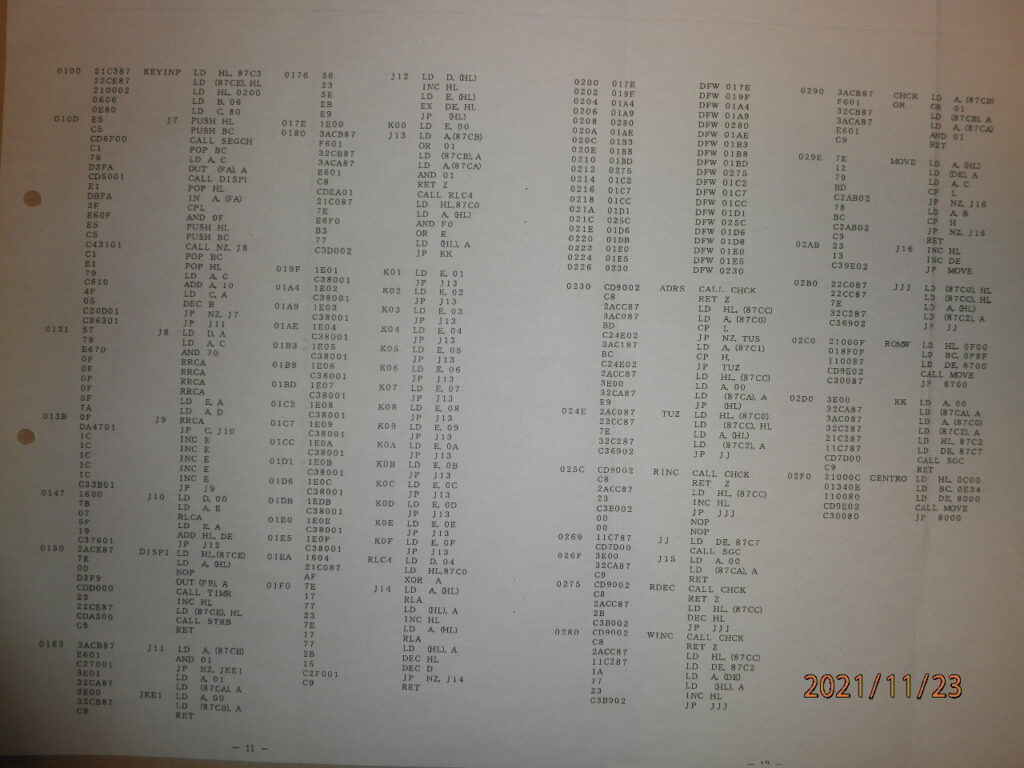
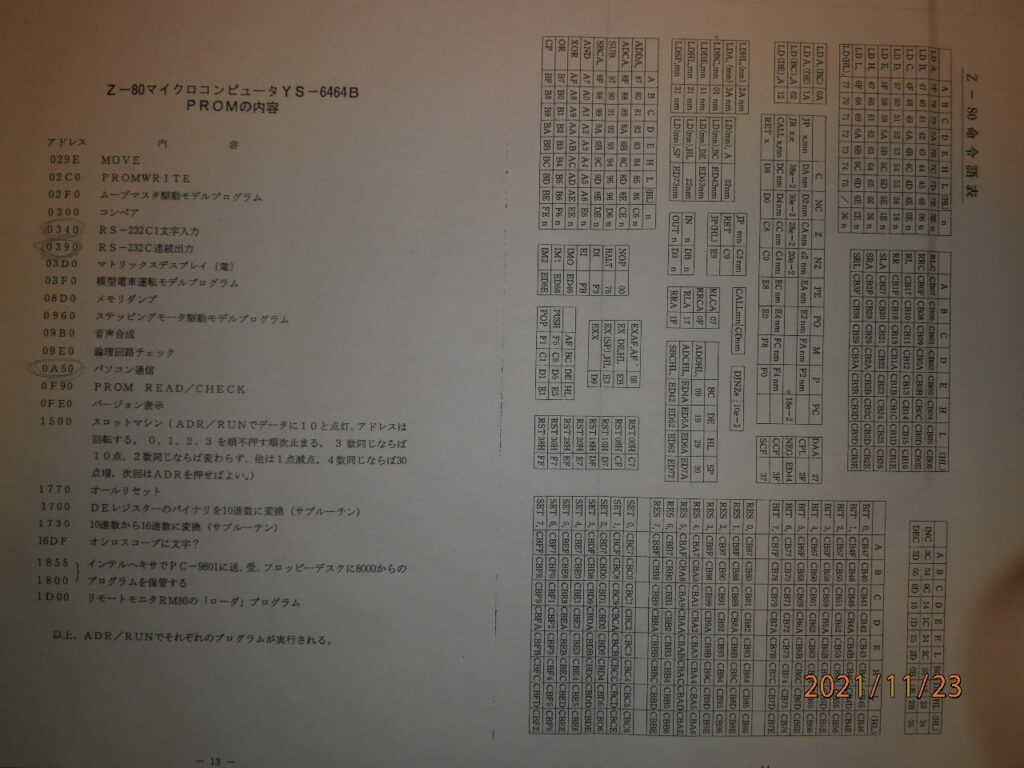
・・・P-ROMの中には色々なソフトが入っています。(シリアル通信のソフトもあるよ)・・・
「YS-6464B」はワンボードマイコンで私の場合はシリアルI/OボードがありませんのでCPUボード上のテンキー入力のみとなります。これが結構大変。短いプログラムならまだしも、長いプログラムとなると入力もチェックも大変になります。
買ってしばらくは、パラレルI/OボードのLEDや7SEGを点灯・点滅させて遊んでいましたが、飽きてしまい、しばらくお蔵入りとなりました。その後、日の目を浴びる時がやってきました。私は以前の職場で半導体製造装置搭載のロボットの修理・調整(コントローラ含む)をしていました。ロボットの修理に先立ちコントローラも一緒に預けて頂ける場合は何も問題は無いのですが、殆どがコントローラのお預かり無しのロボット修理のみで、修理後のロボットの整合性の確認に苦慮していました。
シーケンサが扱える方が1名いらしてその方が整合性確認用にシーケンサにてロボットのエージング装置を作られていましたが、私を含めその他の方もシーケンサの取り扱いは詳しくなく、また、特定のロボット用に作られたため汎用性が無く、私が担当していたロボットもエージング出来たり、出来なかったりと色々あった末、やっとの事重い腰を上げて、あるロボットのコントローラ(社内にたまたまあった)を現状維持のまま改造することにしました(後に、簡単に復旧できるように改造)。このコントローラは4軸制御のコントローラで其々のスイッチを押す度にスイッチに対応したモーターが正転・逆転をするもので、このスイッチのON・OFFをマイコンで連続制御できないかと思いコントローラを分解・調査しました。その後、会社にあったガラクタで専用のパラレルI/Oボードを制作し私物の「YS-6464B・CPUボード」と接続しました。残念ながら、「YS-6464B・パラレルI/Oボード」は仕様が違い、使えませんでした。制作したパラレルI/Oボードに動作状況が判るように、各ポートにLEDを付け、実際にスイッチを接続する前にハード・ソフトの動作確認をしました。
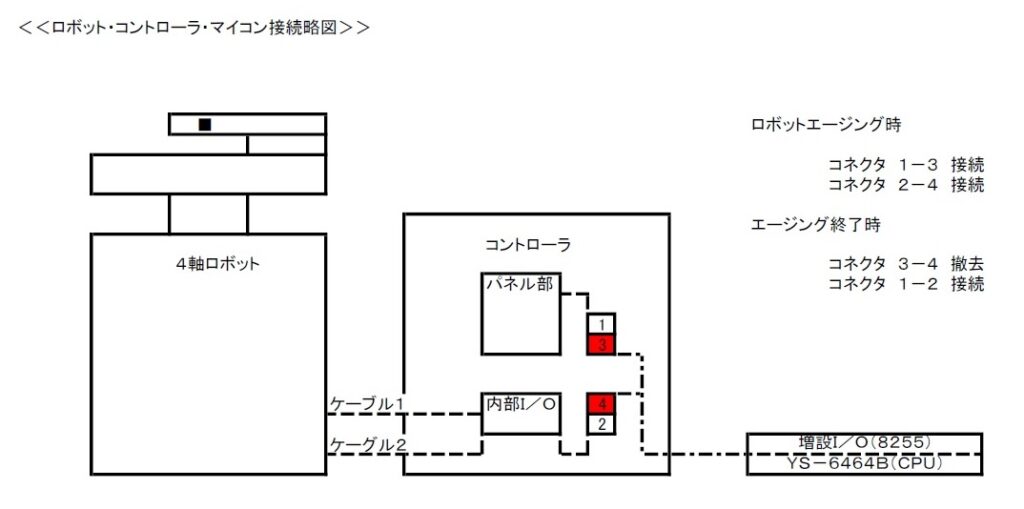
動作確認で不具合がなかったので、いよいよスイッチへの接続です。コントローラ前面パネルの其々のスイッチへ、配線開始です。後できれいに復旧できるようにコネクタ処理も行い、無事終了!!復旧できることも確認しました。復旧確認はコントローラとロボットを実際に接続して検証しました。コントローラの接続をマイコンに切り替え、ロボットを実際に繋いで動作確認を行います。ロボットにはT軸・R軸・Z軸・ロボットハンド旋回軸の4軸があり、T軸(CW・CCW)、R軸(EXTEND・SHRINK)、Z軸(UP・DOWN)、ロボットハンド旋回軸(CW・CCW)の8種類の動作があり、一つずつ順番に動作させ、8種類の動作が完了して1回の連続動作完了となります。1回の連続動作時間を測定し、ざっくりですが1日当たりの動作回数を出し、×3日で何回動作できるかあらかじめ確認します。実際には動作回数はカウントまでしていませんが、3日間昼夜を問わず連続動作ができることが求められていました。各動作のインターバルについては目視にて連続的に動作しているように見える程度としていました。実際のロボットの動作プロセスでは、動作は連続ではなく、待機時間がありました。(半導体メーカーでは、「一年を通してエラー無く動いて当然!!」らしい。笑える。ロボットにも賞味期限があるが。)
と言うことで、当時、会社では3日間連続運転で異常無き事・停止精度にも問題無き事を出荷条件としていました。残念ながら、当時制作したパラレルI/Oボードは会社の備品で作っていたため、今は手元にはありません。写真も残していません。使ったLSIが8255なので、「ま、いっか!!」的な。(笑)
あ、そうだ!!一つ面白いお話!!ロボットとコントローラの修理・調整を仕事としていましたが、その時思ったことがあります。扱っていたロボットとコントロ-ラですが、日本製だけでなく、アメリカ製もありました。日本製はともかく、アメリカ製は色々ありました。わざと強度を落とした設計・仕様として販売し、外観パネルに封印シールが施されていました。コントローラも封印シールがありましたし、内部の半導体チップ表面の型番が削られ、読めない状態にしてありました。ロボットもコントローラも壊れたらメーカーから新たに購入するか、メーカーに修理に出すように仕組まれていましたね。ロボットの修理に関しては、要所要所のベアリングの交差に気を使ってました。ベアリング表面の型番で購入し、使用しているのに精度が出ないとかあるんですよ。ベルトもそうですね。同じ型番で注文しても届いたものは全くの別物なんてありました。ベアリングやベルト・ワイヤー、ギヤ等、注意が必要でした。国内の半導体メーカーにも、一癖二癖あるところもあったですね。「敵城視察」でしたね。10名位で来社して半日くらい社内を視察・質問してました。当然のことながら、前日にはきれいさっぱり、ロボットとコントローラは片付けて別の場所へ移動し、対応がかなり難しい物や、ごくありふれた物だけお客の前に出して動かしてました。お客は修理技術を何とか引き出そうと躍起になってた。「アホか!!」「こっちはこれでメシ食ってる」って気持ちで白い目で見てました。お客は結局、最後は憤慨して帰って行き、その後は仕事は出してこない。最初から出す気も無いのが判っていたから何ともなかったけど。(笑)このような屑メーカーもあれば、贔屓にしてくれるところもあった。東日本大震災で工場が被災し復旧のためロボットを緊急に修理してほしい旨の連絡があって、私が直々に、すぐに着手した。修理後「ありがとうございました」の連絡。数ヶ月後、その半導体メーカーから、会社に表彰状が届いた。こんなことは初めてだった。嬉しかった。一つ面白い話!!と言いながら、長くなりましたね。申し訳ない。m(ーー)m
会社の備品で作った8255使用のパラレルI/Oボードですが、8255の初期設定のためのアドレス線をどれにするのかがポイントになります。8255はプログラム上で初期設定が必要です。初期設定でAポート・Bポート・Cポート其々を入力にするのか、出力にするのかを設定しなくてはなりません。私の場合、ABCすべてのポートを出力として、使用しました。(スイッチへ繋がるコントローラ側のI/Oの入力ポートへの+5V出力のみでした)
Follow me!